
Existing exoskeletons, one of the main applications of robotics in medicine, are made of expensive bulky, rigid materials that are always going to struggle to fit the individual. After all, if it is difficult enough to find a comfortable pair of shoes then something that requires contact across much larger areas of the body is going to present problems. But the materials used for such exoskeletons, or robotic support structures, must be rigid and strong by definition, as they are supporting a body that is unable to support itself. Or do they?
Researchers at the Reconfigurable Robotics Lab, EPFL in Lusanne (http://rrl.epfl.ch) are working on soft materials that could provide an alternative solution. Prof Jamie Paik, who is leading the research group, said of the existing, rigid exoskeleton solutions: “Such designs are effective in achieving high accuracy, high load, high speed applications, but at a cost of bulky parts and hard joints that inherently suffer from low conformability. Therefore, they rely highly on finely tuned control to make sure the fluidity of motions is achieved.
“Another way of achieving the conformity while producing the mechanical support these systems require, is in taking the advantage of material properties. Silicone rubbers are inherently flexible and conforming. But if we can have a clever design and controllable pressure input with strategic control algorithm, we can make the system support impressive loads while not necessitating numerous control points. This is one of the driving reasons that we are searching for solutions within the soft robots paradigm.”

A belt designed to give upper body postural support – the movement of artificial muscles (or soft robots), the pink tubes in this case, can be precisely controlled to bend in any way a medical team wants.
The materials used are low-cost, compliant, off-the-shelf materials in order to make the robots manufacturable and scalable. Since soft robots are being designed to exhibit high flexibility and adequate mechanical strength at the same time, a variety of soft elastomeric materials have been tested and mechanically characterised in the lab before usage. Typically used materials include rubbers, foams and plastics.
Numerical simulations are then carried out for components with a view to design more efficient robots in terms of motion and force performance. Based on the numerical model predictions, only the most efficient designs are then fabricated and tested. The soft robots are fabricated from these materials using processes such as moulding, 3D printing and laser cutting.
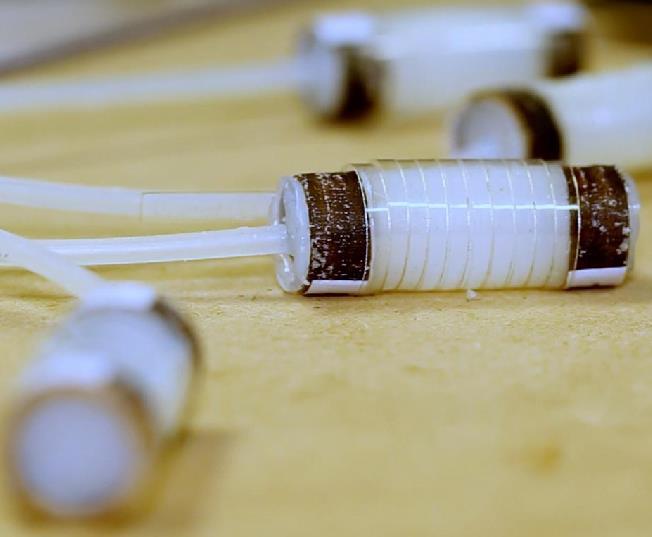
The soft actuators developed at the RRL are pneumatic and are actuated with the help of pressurised air. Dr Gunjan Agarwal, a member of the research team, described the operation: “The actuators possess a hollow chamber inside a soft material core which serves as the passage corridor for the pressurised air input supply. The air pressure is precisely controlled to ensure adequate inflation. The actuator core is made from a highly flexible elastomer material, to ensure a large range of motion.
“To constrain excessive radial inflation, the actuators are reinforced with thin shell structures made from materials stiffer than the core material. Pre-defined patterns on the shell body govern the motion profile obtained with the actuator, such as bending, linear extension, compression, twisting or a complex combination of different motion profiles. The shells are interchangeable between actuators, enabling achievement of multiple motion profiles with the same actuator.”
Such systems are going to have limitations. “Soft pneumatic actuators (SPAs) do not satisfy all the problems in actuation sources,” said Prof Paik. Currently we have 100N load supporting ‘muscle packs’ that are quite effective and in series they end up supporting up to 400 – 500N load. However, larger than that load, this SPA also starts getting very bulky so that a conventional system would start looking sleeker. So there definitely is a sweet spot where SPAs fit better than other types of actuator solutions in terms of size and control bandwidth.”
 Most of the work so far has been focused on designing and characterising the new SPAs. In terms of control, so far the team has used stored user movement data, or gyroscope readings from the wearers but are anticipating both the user and therapists will eventually control the movement and stiffness modulation of the actuators directly through different inputs, for example heart rate, fall detection via acceleration change, temperature, preprogrammed gait pattern, remote controlled via vision sensing, etc.
Most of the work so far has been focused on designing and characterising the new SPAs. In terms of control, so far the team has used stored user movement data, or gyroscope readings from the wearers but are anticipating both the user and therapists will eventually control the movement and stiffness modulation of the actuators directly through different inputs, for example heart rate, fall detection via acceleration change, temperature, preprogrammed gait pattern, remote controlled via vision sensing, etc.
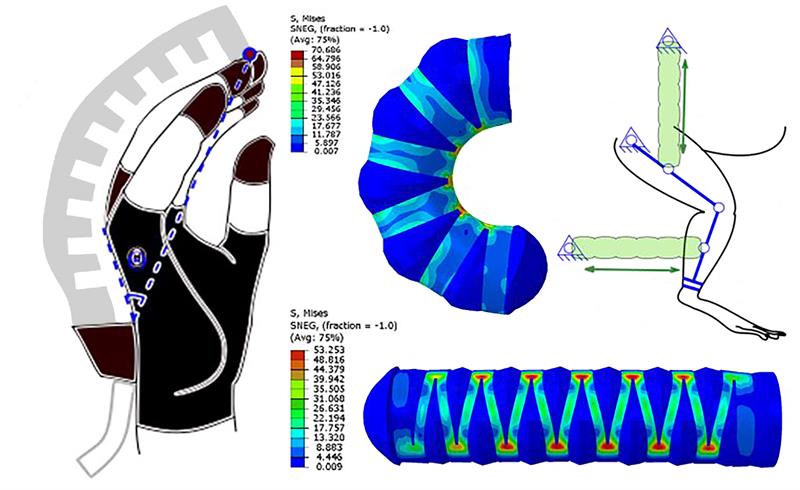
“Soft robots are easy to fabricate but challenging to control due to the unpredictable mechanical behaviour of the soft materials used at large levels of strains,” Dr Agarwal. “We need to carefully control the trajectories and force outputs of our robots to customise them for applications in human assistance. This is why we developed a computational modelling and design tool for these systems using the finite element method.
“The complex mechanical behaviour of the soft materials employed and the intended robotic systems is very accurately captured and described with the help of our numerical models. Since these models are not trivial to develop and require a significant investment of computational time and effort, we have also made our modelling and design tool available open-source to the robotics community for free usage. Using our models and performance predictions, anybody wanting to develop a soft robot can quickly optimise their design to achieve the targeted operation space.”
And it doesn’t need to stop here. Dr Agarwal sees this as only the start of the long path for soft robots to walk down. “Some exciting developments in the recent past in context with soft robotics include the combination of expertise from diverse disciplines such as innovative 3D printing, mechanical engineering, and microfluidics to demonstrate autonomous, untethered, entirely soft robots,” she claimed.
 “These robots could pave the way for a new generation of completely soft, autonomous machines. Soft robotics could revolutionise how humans interact with machines. But researchers have struggled to build entirely compliant robots. Electric power and control systems - such as batteries and circuit boards - are rigid and until now soft-bodied robots have been either tethered to an off-board system or rigged with hard components. This is rapidly changing with the latest advances in design, manufacturing and control of soft robots, such as some of the techniques described here and that are implemented in our work.”
“These robots could pave the way for a new generation of completely soft, autonomous machines. Soft robotics could revolutionise how humans interact with machines. But researchers have struggled to build entirely compliant robots. Electric power and control systems - such as batteries and circuit boards - are rigid and until now soft-bodied robots have been either tethered to an off-board system or rigged with hard components. This is rapidly changing with the latest advances in design, manufacturing and control of soft robots, such as some of the techniques described here and that are implemented in our work.”
Prof Paik concluded: “Recent advances in soft robotics have proved that this field has promising potential for application in biomedical rehabilitation and human assistance. However, the advances are still restricted to the laboratory. With the new advancements in the manufacturing and control of soft robots, large-scale industrial production of soft robots is inevitable and is set to revolutionise the perspective on robotics.”



