
As the smuggler’s boat hit the Scottish beach he jumped off, bag in hand. Quickly, he sprinted up the beach to the car park where he threw the bag on the back seat of the waiting car. Panting, he started the engine in a hurry and with a squeal of tyres on asphalt the car sped towards the main road. Suddenly, two vehicles came out of nowhere and blocked his path. He’d been caught. Little did he know he’d been watched for hours by the unblinking eye of the Army’s Watchkeeper UAV which had been feeding back his every move to a control centre on the ground.
Rather than the opening of a Robert Ludlum or Andy McNab novel, this was one of many manoeuvres carried out during October in Wales and Scotland as the Royal Navy demonstrated unmanned aerial, surface and sub-surface technology as part of Unmanned Warrior.
Unmanned Warrior was announced in 2014 by the Royal Navy’s First Sea Lord, Admiral Sir George Zambellas to be held alongside the UK’s Joint Warrior exercise. The event brought together SMEs from industry as well as academia and government organisations to work together to showcase unmanned systems and capabilities. The operations involved Unmanned Aerial Vehicles (UAVs), Unmanned Underwater Vehicles (UUVs) and Unmanned Surface Vehicles (USVs) conducting a number of challenging scenarios across different themes.
The hardware on show at the event was impressive, 50 vehicles performing tasks ranging from reconnaissance to mine detection and even stopping attacks on other ships.
BAE Systems has provided the Pacific Class 950 Rigid Inflatable Boat (P950 RIB) as an optionally unmanned testbed for sensor systems in collaboration with ASV Global, which - alongside Dstl - has also provided the MAST (Marine Autonomy Surface Testbed). Both can be operated by a human pilot, remotely or fully-autonomously and were used to intercept and block a number of fast inshore attack craft from reaching their intended target.
 Three MASTs intercept and route an attacking craft away from its target
Three MASTs intercept and route an attacking craft away from its target
There is a big difference between the systems used in autonomous cars and these USVs. Even though autonomous cars have to be on constant look out for the actions of pedestrians and other road users, the sea is a completely unpredictable environment. The systems on these USVs have to deal with tides, waves, flotsam and jetsam as well as having to take into account the movements of traffic that can move in any direction.
The USVs use a combination of AIS (Automatic Identification System), radar and optical sensors (thermal, infrared, a low light colour camera and an eye-safe laser range-finder) to plot a course through the water, avoiding objects as well as complying with COLREGs, the highway code of the sea.
“It’s not that simple to integrate the AIS, radar and other sensor information together,” explained Dr Howard Tripp, autonomous systems R&D lead at ASV Global. “During UW you’re trying to find jet skis and huge war ships and those have very different radar signals, so trying to get one system to do both of those is quite a challenge.”
He acknowledged that the system isn’t perfected just yet and, after optimising it for use on the Solent, the team had to do a lot of extra parameter tuning as the conditions in Scotland were quite different.
One of the big challenges that has presented itself on the MAST is its low profile hull and high speed capability. The combination of speed and the fact that the camera is never more than a few feet above the surface of the water means that water is constantly hitting the five lenses that make up the Ladybug5 Spherical Imaging System.
“Positioning the camera is not easy and in big waves you’re constantly losing and re-acquiring your target,” Dr Tripp said. “We’ve done a lot of de-risking activity in the initial design to look at several different algorithms such as corner detection, edge detection, contrast detection, colour detection, and how you can best use that to detect obstacles in front of you.”
 That work is currently underway with Roke Manor Research and the next step is to integrate the camera data with the radar data. “We take the radar and sensor data feed from the boats as well as chart data of non-moving risks, like rocks and beaches, from that we create a risk landscape,” explained Simon Atkinson, naval and maritime client manager at Roke Manor Research. “We’ll identify where objects are and where they’re moving and that’s then used for path planning: where the boat needs to go, what tasks we want it to achieve, what the risks along the way are gives the path it needs to take.”
That work is currently underway with Roke Manor Research and the next step is to integrate the camera data with the radar data. “We take the radar and sensor data feed from the boats as well as chart data of non-moving risks, like rocks and beaches, from that we create a risk landscape,” explained Simon Atkinson, naval and maritime client manager at Roke Manor Research. “We’ll identify where objects are and where they’re moving and that’s then used for path planning: where the boat needs to go, what tasks we want it to achieve, what the risks along the way are gives the path it needs to take.”
BAE Systems found that the information being sent back by sensor systems on its P950 RIB threw up some problems.Dr Simon Colby, unmanned systems product group engineering manager and system design authority, BAE Systems, said: “Many of the sensors on the RIB are on detect, so when they detect something they report it back, some are on a regular time step, sending back information intermittently depending on how the sensor or the comms work. This meant that the information coming through wasn’t always in real-time which caused some issues for us in the beginning.”
However, he added that the underlying Combat Management System deployed on Northern River has mechanisms in it to allow for late or intermittent reporting of information to allow for the latency of the information coming back from the sensors.
UAVs carried out ISTAR (intelligent surveillance target acquisition and reconnaissance) roles during Unmanned Warrior. These included Thales and the Army’s Watchkeeper UAV, Schiebel’s CAMCOPTER S-100, Blue Bears’ Blackstart light observation UAV, the US Navy’s NRQ 21 fixed wing system, the twin-engine Sea Hunter, a VIDAR (visual detection and ranging) fitted Boeing ScanEagle and Leonardo’s Solo helicopter, which can fly with a human pilot or autonomously.
Sea Gliders and Wave Gliders are autonomous platforms that carried out hydro and geo-intelligence missions, recording information on the sea, including its salinity, its temperature - and how this changes with depth - what may be in it and other similar measurements.This information is sent back with a GPS location from the glider as it moves and a rich field of data can be mapped out by the hydrographic experts to help improve our understanding of the waters around our shores, to the benefit of all who work on them.
The most mature technology on show was maritime mine countermeasures (MMCM). Carried out by a combination of UAVs, USVs and UUVs, run by QinetiQ, SeeByte, Blue Bear, ASV Global and BAE Systems, it is also the most complex. The unmanned vehicles all communicate with each other while sensing for, locating and safely detonating mines.
Dr Philip Smith, programme manager for ship systems and integrated survivability at Dstl, said: “We want to try and take lessons learned from MMCM, which is a static scenario, i.e. the threats don’t move, and transfer that into dynamic scenarios like ISTAR and anti-submarine warfare (ASW) where the threats are actually moving and the interactions become more complex.”
A significant part of all the operations was understanding and learning the best way of commanding and controlling many systems, especially having up to seven UAVs flying in the same airspace, and each using different ways of sensing (radar, multi-camera, infra-red).
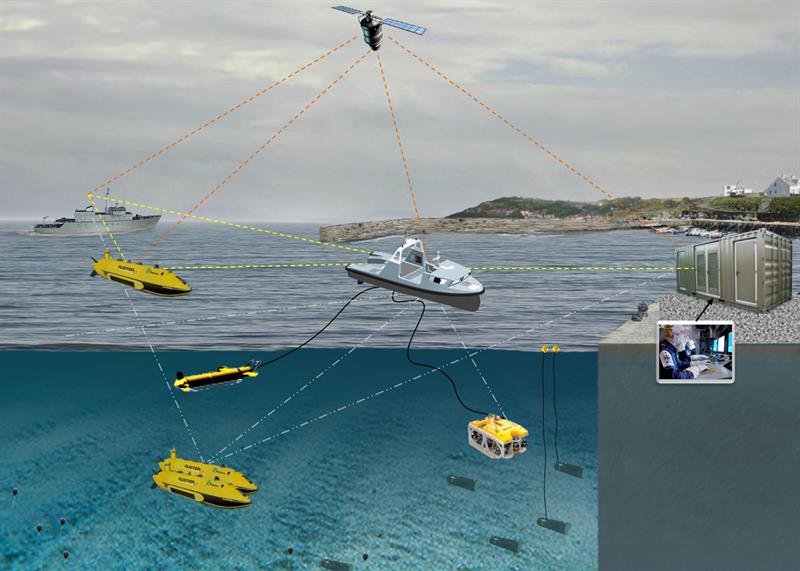 Thales' Halcyon USV deploys UUVs, ROVs and Towed Synthetic Aperture Sonar (T-SAS) while communicating with Northern River and a shore-based station via high-data-rate communication links
Thales' Halcyon USV deploys UUVs, ROVs and Towed Synthetic Aperture Sonar (T-SAS) while communicating with Northern River and a shore-based station via high-data-rate communication links
This led Dr Smith and an industry team of BAE Systems, QinetiQ, Thales and SeeByte to develop an application called ACER (Autonomy Control Exploitation and Realisation). ACER was, effectively, the glue of the whole operation. The plan was to communicate with six vehicles, two UAVs, two, UUVs and two USVs. However, due to the systems’ open architecture, 25 of the total 50 vehicles at Unmanned Warrior, operated by 12 companies from six different countries, were connected over the two weeks of operations, vastly exceeding expectations.
The ACER application was hosted on OACS (an Open Architecture Combat System). OACS is a modified version of a Royal Navy surface ship Combat Management System (CMS), which enables the CMS to run alongside and exchange information with other applications.
“The simplest way to describe an OACS system is to compare it to a mobile phone,” Dr Smith explained. “Old mobile phones made telephone calls and, perhaps, sent texts. Now we’ve moved to an era of smartphones that are computers that can run applications alongside the phone. That’s what we’re trying to do with the Combat Management System, we’ve turned it into a system which allows us to add other applications to it.”
The combination of ACER running on OACS enables the co-ordinated operation of multiple unmanned vehicles, so that the location of each vehicle is known, hence avoiding collisions. Plus, it enables the queuing of unmanned vehicles onto targets of interest.
Dr Colby, said: “The biggest individual runs involved 10 vehicles of six individual types in MMCM, one USV, one UAV and eight UUVs which, we believe, is a world record.” This is made more remarkable due to the fact that ACER didn’t exist at all before Unmanned Warrior was announced.
“We had a concept with an associated plan that looked to conduct sea trials in Summer 2017 or 2018,” Dr Smith remarked. “Then this challenge came along and we thought it was worth taking the risk to advance the planned timescale because of the opportunity provided by having access to all those unmanned vehicles. We built the kit within a year, and we are very pleased that it worked as well as it did.”
Unusually good weather helped all involved to reach their targets early. For example, it allowed ASV to carry out extra blocking manoeuvres with MAST that saw the speed of the boat increase from 15 to 30knots.
Vince Dobbin, sales and marketing director at ASV Global, commented: “The Navy thought it was being very ambitious, but in fact, it wasn’t ambitious enough. Industry is probably further ahead than the Navy thought it was, everything it asked industry to do was achieved - plus.”
Since Unmanned Warrior, the Navy will now ask questions: How much did these systems help with situational awareness at sea? Did they improve what warships with helicopters can find out for themselves? If so, for how long and how accurately? Are they reliable? Are they safe?The answers to these questions will see the designs refined for future Joint Warrior naval demonstrations which are carried out every six months.
Fast Facts Unmanned Warrior encompassed five themes:
|



