
“Humans have an innate sense of how the parts of their bodies are positioned, even if they can't see them,” explained Marcia O'Malley, professor of mechanical engineering at Rice. “This 'muscle sense' is what allows people to type on a keyboard, hold a cup, throw a ball, use a brake pedal and do countless other daily tasks.”
The scientific term for this muscle sense is proprioception, and Prof O'Malley's Mechatronics and Haptic Interfaces Lab (MAHI) has worked for years to develop technology that would allow amputees to receive proprioceptive feedback from artificial limbs.
Eighteen able-bodied test subjects were found to perform significantly better on size-discrimination tests with a prosthetic hand when they received haptic feedback from a simple skin-stretch device on the upper arm.
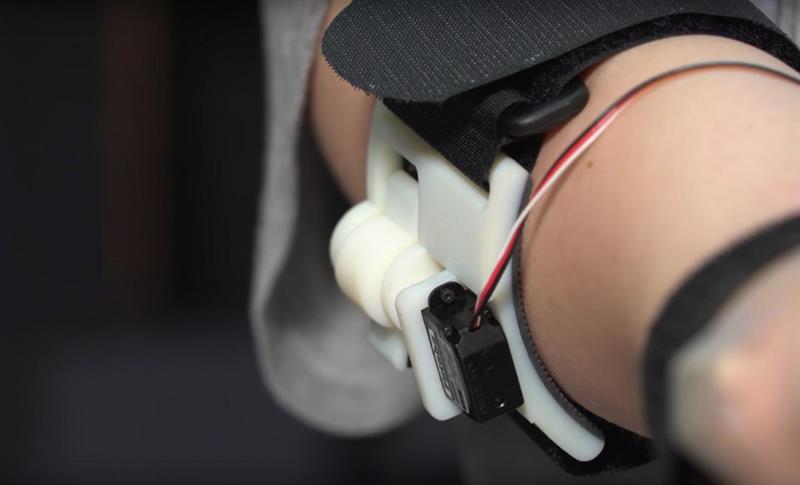 While some proprioceptive technologies require surgically implanted electrodes, the Rice Haptic Rocker has a simple, non-invasive user interface: a rotating arm that brushes a soft rubber pad over the skin of the arm. At rest, when the prosthetic hand is fully open, the rocker arm does not stretch the skin. As the hand closes, the arm rotates, and the more the hand closes, the greater the skin is stretched. This tactile sensation on the skin acts as a replacement for information the brain would normally get from the muscles about hand position.
While some proprioceptive technologies require surgically implanted electrodes, the Rice Haptic Rocker has a simple, non-invasive user interface: a rotating arm that brushes a soft rubber pad over the skin of the arm. At rest, when the prosthetic hand is fully open, the rocker arm does not stretch the skin. As the hand closes, the arm rotates, and the more the hand closes, the greater the skin is stretched. This tactile sensation on the skin acts as a replacement for information the brain would normally get from the muscles about hand position.
Like the Rice Haptic Rocker, Pisa/IIT’s SoftHand prosthesis uses a simple design. Its co-creator, postdoctoral research scientist, Manuel Catalano said the design inspiration comes from neuroscience.
“Human hands have many joints and articulations, and reproducing and controlling that in a robotic hand is very difficult,” he said. “When you have to grasp something, your brain doesn't program the movement of each finger. Your brain has patterns, called synergies, that coordinate all the joints [in the hand].”
The SoftHand uses a control synergy just like people do in everyday life, Catalano said. “At the same time, thanks to the intrinsic capability of the SoftHand to adapt and deform with the environment, it is robust and able to grasp objects in many different ways.”
The researchers said neurological studies have identified a set of synergies for the hand. People use these alone or in combination to perform tasks as simple as turning a doorknob and as complex as playing the piano. Grasping an object, like a cup or a coat hanger, is one of the simplest.
In tests, subjects used the SoftHand to grasp objects of varying shapes and sizes, ranging from grapefruit-sized balls to coins. To close the hand, subjects simply flexed a muscle in their forearm. Electrodes taped to the arm picked up electric signals from the flexing muscle and transmitted those to the motor in the SoftHand.
For the size-discrimination test, subjects were blindfolded and asked to grasp two different objects. They were then asked which of the two was larger. Without haptic feedback, the blindfolded subjects had to base their guesses on intuition. They chose correctly about 33% of the time, which is expected from a random choice. When they performed the same tests with feedback from the Rice Haptic Rocker, the subjects correctly distinguished the larger from smaller objects more than 70% of the time.
The researchers are following up to see if amputees get a similar benefit from using the haptic rocker in conjunction with the SoftHand.



